The mount is parallactic with... it is derived from mount of the Liden observatory. The main Right Ascension circle has 480 saws and it is connected over a small gear with 20 saws to a 200 steps steeper motor. A declination circle has 1080 saws, 60 saw small gear and the same steeper motor. Both 2 phase steeper motors SL34-3550 with 1.8 angle step are controlled by the two MICROCON controllers M1486A on CD40M board over serial port and PC.
The telescope is controlled by the xmove utility developed by our team member J. Polcar.
The mount's gear boxes was reconstructed (from Dec 1998). This operation was enabled due to our sponsor - DII (Delong Instruments Industrial) - precise mechanical engineering company. We thank them very much. Reopening of observations was done on April 1999.
We have a measure of a periodic error. This images was grabbed at the night 2002-01-25/26. It shows a position of the centroid of an anonymous star near the equator and the meridian.
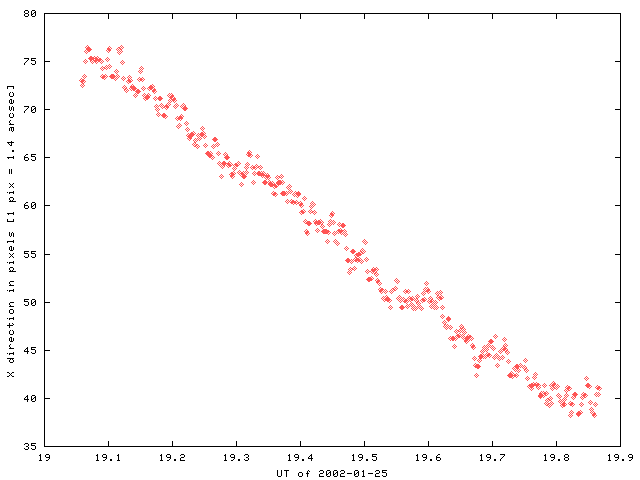
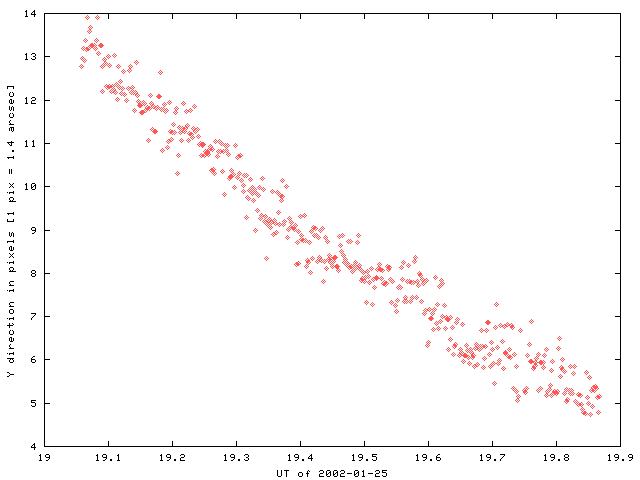
The periodic error reveales a non-wave (sinus) behavior due to our mountion driver. The (fine-tunned) velocity is derived by the combination of the isolated steps.
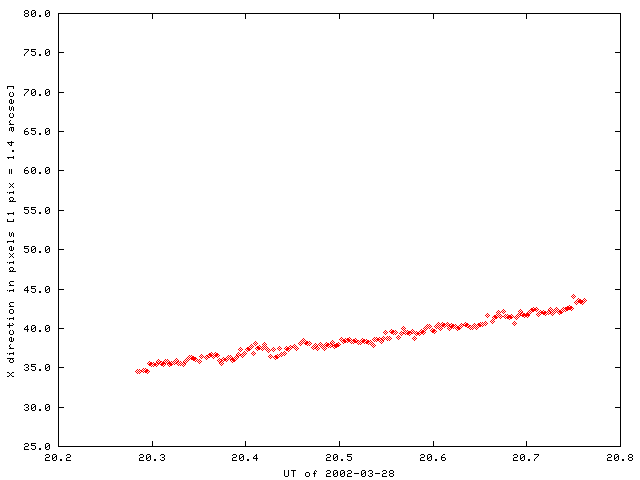
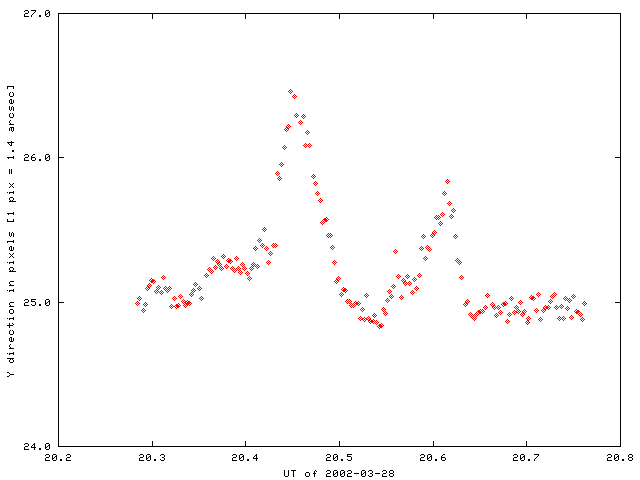
A new measuremnet of (un)periodic error has been done at 2002-03-28 after an important hardware change. The frequency of the mount clock is controlled by a new chip builded to our RA controller (courtesy of technician of HaP MK Brno M. Wudia).
The un-periodic behavior still appeares, but the differential (mount vs. sky) velocity is rapidly smaller. This velocity is 0.3 pix/min. The peaks in Y coordinate are a new puzzle.