Next: Lineární transformace
Up: Kalibrace souřadnic snímku
Previous: Kalibrace souřadnic snímku
Gnomonická projekce je průmět ze středu koule na rovinu připlácnutou
k ploše. Pokud je střed promítání (místo připlácnutí) na souřadnicích
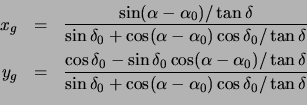
 pak se sférické souřadnice
pak se sférické souřadnice
 zobrazí na snímku do pravoúhlých souřadnic:
zobrazí na snímku do pravoúhlých souřadnic:
Tato transformce slouží především na převod sférických souřadnic na
pravoúhlé.
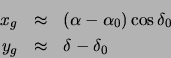
Dá se ukázat, že v případě, že máme malé zorné pole (tj. rozdíl
mezi polohami je jen pár stupňů) pak
se dají tyto vzorce napsat jako:
Při redukování CCD snímků prakticky vždycky tato přesnost vyhovuje.
Z tohoto tvaru můžeme ovšem na první pohled usuzovat na některé vlastnosti.
Především střed snímku má souřadnice 0,0 který neodpovídá běžnému
konvenčnímu středu souřadnic na snímku, kde je 0,0 v levém dolním rohu.
Souřadnice nabývají kladných i záporných hodnot. Měřítka jsou
také jiná. Rozměr CCD matice je obyčejně od několika stovek do
několika tisíc. Naproti tomu, po této transformaci budou jeden
stupeň vzdálené objekty na souřadnici jen 0.6.
Tip. Zkuste si odvození transformace provést. Jaké se dopustíte chyby
při použití zjednodušené transformace v případě že objekt je stupeň od
středu?
Next: Lineární transformace
Up: Kalibrace souřadnic snímku
Previous: Kalibrace souřadnic snímku
Filip Hroch
2002-11-04